Meu primeiro robô – EV3
Olá meninas cientistas, como vão vocês? Hoje vamos começar a conhecer o nosso primeiro robôzinho, o EV3.
Primeiro de tudo…
Você sabe o que é um robô?
De acordo com o Wikipédia, um robô é um dispositivo, ou grupo de dispositivos, eletromecânicos capazes de realizar trabalhos de maneira autônoma ou pré-programada. Em outras palavras: um robô é um monte de componentes elétricos e mecânicos que realizam trabalhos sozinhos ou que obedecem comandos.
Existem diversos tipos de robôs, uns parecem humanos, e outros que se assemelham ao Wall-E, do filme da Disney.
Exemplos de robôs:
- Robôs Humanoides
Tem esse nome porque lembram humanos, e executam funções que parecem com as nossas. Exemplo, robôs jogando futebol:
Robôs jogando futebol na competição RoboCup
- Robôs Industriais
Os robôs industriais são usados na indústria para substituir o trabalho braçal. São usados para tarefas muito repetitivas e que envolvem precisão. Um exemplo de robô industrial é o braço mecânico, que parece o braço o humano:

Braço Mecânico
- Robôs “maker”
O termo “maker” vem do inglês e significa “criador”. Esse é o tipo de robô que nós que criamos com coisas recicladas ou compradas em lojas, e que obedecem regras mais simples. Ele que usaremos nas nossas próximas oficinas!
Kit robô maker
O robô maker possui alguns componentes principais, são eles:
Motor e roda, responsáveis pelo movimento do robô. Com eles que conseguimos fazer o robô andar para qualquer lugar que a gente quiser.

Imagem de um motor com roda
Chassi, que é o corpo do robô, onde colocaremos todas as pecinhas dele.

Imagem do Chassi com 4 rodas
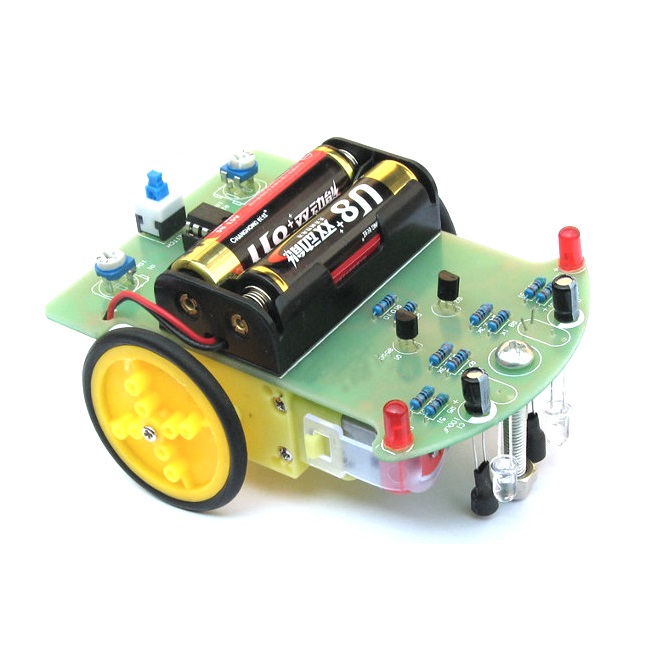
Suporte de pilha. Nele nos colocamos as pilhas, que darão a energia necessária para nosso robô conseguir andar.
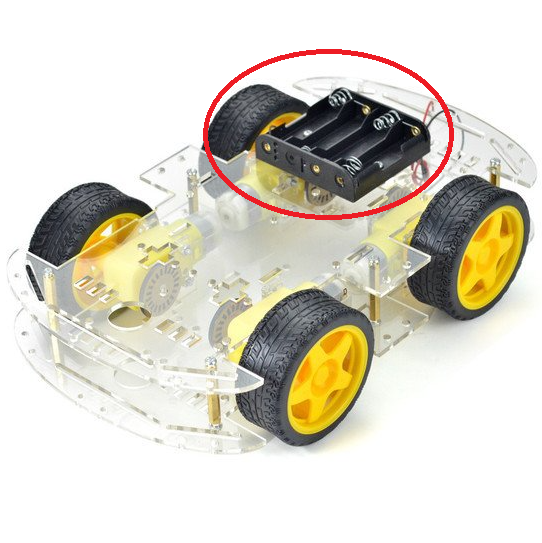
Imagem de um robô com suporte de pilha
E o cérebro do robô, a placa controladora. Existem várias de diversas marcas, e um exemplo é o micro:bit. Nós conseguimos conectar o motor no micro:bit e enviar comandos para que ele obedeça, legal né?
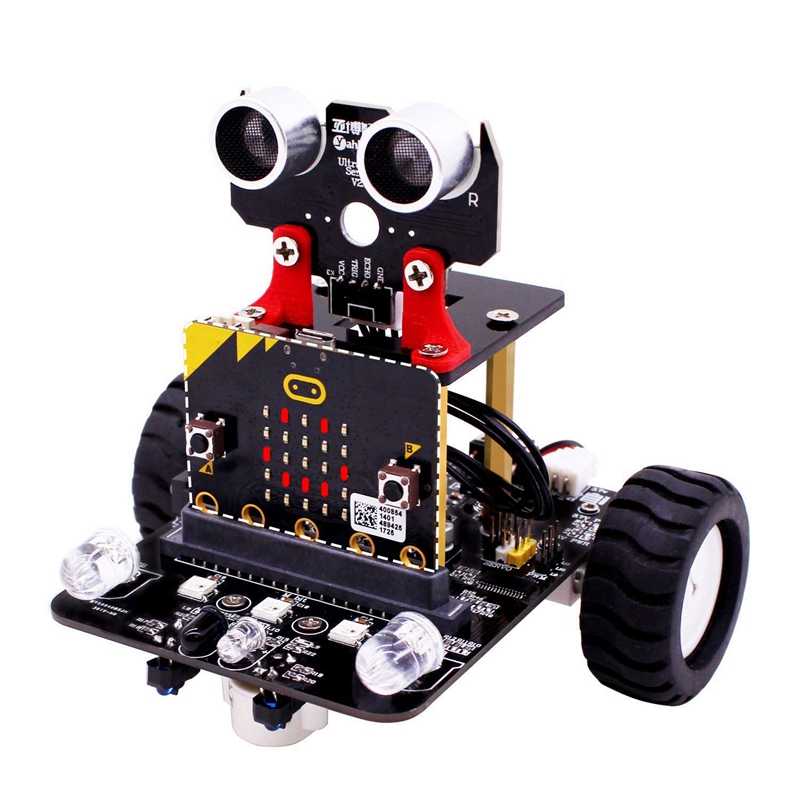
Robô com micro:bit
E como que toda essa parafernália junta funciona? As pilhas enviam energia para que o micro:bit e o motor funcionem. O micro:bit envia comandos de como o motor deve girar, se é para frente ou para trás, rápido ou lento. E o chassi é onde colocamos isso tudo para que consiga se mover sem cair tudo.
Começando…
Vamos escolher nosso robô no app Open Roberta.
> Clique em ![]() no canto superior direito.
no canto superior direito.
> Aperte na setinha até chegar na caixinha escrito EV3 e clique nela.
> Escolha a terceira opção: EV3dev
Pronto, seu robô está pronto para ser usado!
E agora?
O robô possui componentes para que eles façam as coisas parecidas com os humanos, por exemplo:
Ao invés de pernas, o robô possui motores com rodas que permite a ele se locomover para qualquer lado.
O nosso cérebro envia pequenos comandos elétricos para que nosso corpo execute a função de mexer a perna para andar, e também envia comandos para que viremos para os lados. Toda e qualquer ação que fazemos é o nosso cérebro enviando comandos para nós. Intrigante, né?
E acontece o mesmo com o robô! O robô possui um cérebro (plaquinha eletrônica, como o micro:bit), e possui pernas (os motores e rodas), mas ele não consegue pensar sozinho, nós que temos que dizer para o cérebro do robô mandar os comandos.
E hoje faremos nosso robô dar os primeiros passos!

Movimentos no EV3
Para acessar os comandos de movimento, precisamos clicar no primeiro quadradinho laranja no lado esquerdo da tela, o botão ![]() . Ele é responsável pelos comandos de ação, o que manda o robô fazer algo.
. Ele é responsável pelos comandos de ação, o que manda o robô fazer algo.
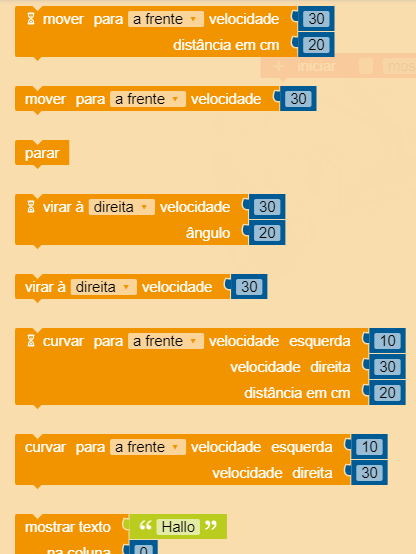 Quando clicamos nesse botão, aparecem diversos comandos que movimentam o robô. Dentre eles, os comandos:
Quando clicamos nesse botão, aparecem diversos comandos que movimentam o robô. Dentre eles, os comandos:
mover para a frente
virar à direita
Nós usaremos esses comandos para fazer o robô andar para qualquer lado que quisermos.
![]()
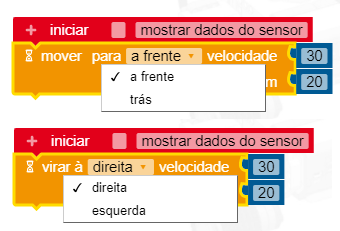 Quando escolhemos o comando mover para a frente, podemos mudar ele para mover para trás. Para isso, é só clicar na setinha e mudar o modo.
Quando escolhemos o comando mover para a frente, podemos mudar ele para mover para trás. Para isso, é só clicar na setinha e mudar o modo.
Podemos fazer isso também para o virar à direita.
Pronto! Agora que conhecemos os comandos de andar podemos dar nossos primeiros passos com o robô.
Primeiros passos
Vamos fazer nosso EV3 andar para frente.
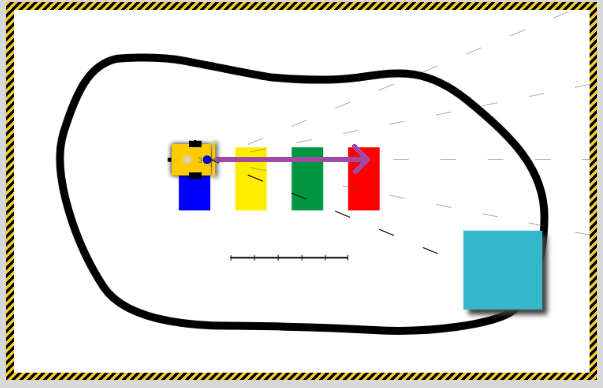
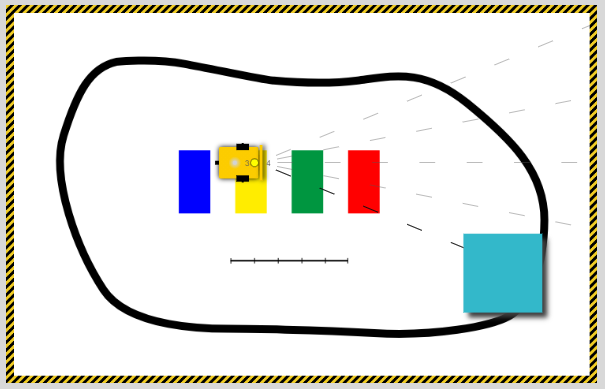
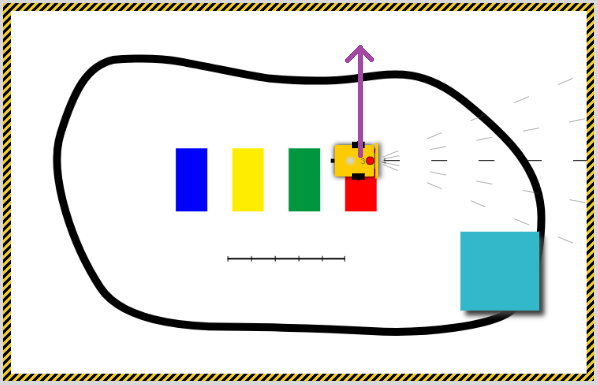
Quando abrimos o simulador essa é a primeira imagem que aparece, o robô começa no bloco azul. Vamos fazer ele andar em linha reta até chegar ao bloco vermelho. A seta roxa mostra o caminho que andaremos. Para isso, usaremos o comando mover para a frente.
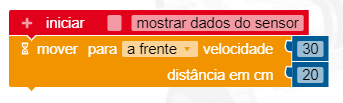
Quando usamos ele dessa forma, ele vai mover o robô 20 centímetros (cm) para frente. Ao simular esse código, vemos que ele não chega até a cor vermelha.
Então o que vamos fazer? Vamos testando valores diferentes de distância até que ele consiga chegar ao bloquinho vermelho.
OBSERVAÇÃO: Se o robô não voltar para o início (o bloco azul), é só clicar no botão![]() , o quarto botão no simulador, na parte inferior da tela.
, o quarto botão no simulador, na parte inferior da tela.
Trocando o valor de distância, ficamos com o código:
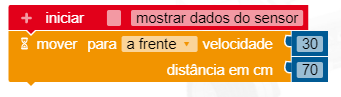
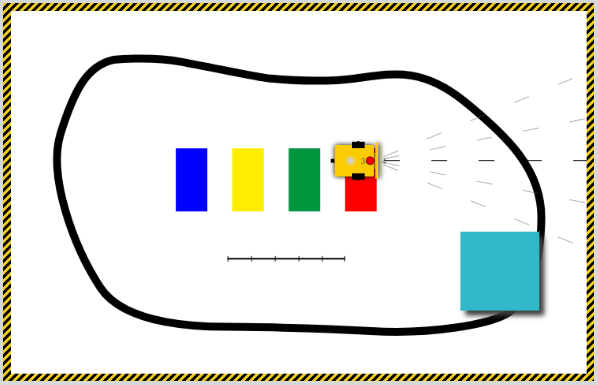
Depois de testar outros valores de distância, descobrimos que com 70cm é possível chegar no bloquinho vermelho. Veja:
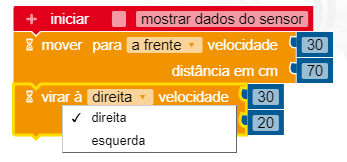
E agora, como eu viro? Simples! Usar o comando virar à direita (ou esquerda).
Após chegar na cor vermelha, eu quero que o robô vire para a esquerda até chegar depois da linha preta. Como podemos ver na imagem a seguir:
Para isso, eu coloco o comando de virar à e clico no “direita” e mudo para “esquerda”.
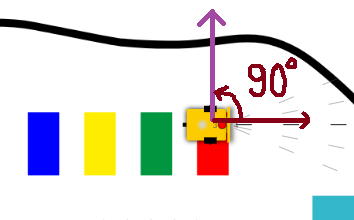
Agora é preciso ajustar o ângulo que eu quero que ele vire. Nosso robozinho está virado para frente, e eu quero mover ele para o lugar da seta roxa na esquerda. Imagino que um ângulo de 90º é capaz de mover o suficiente. Vamos testar?
Vemos que o robô moveu exatamente o que queríamos.
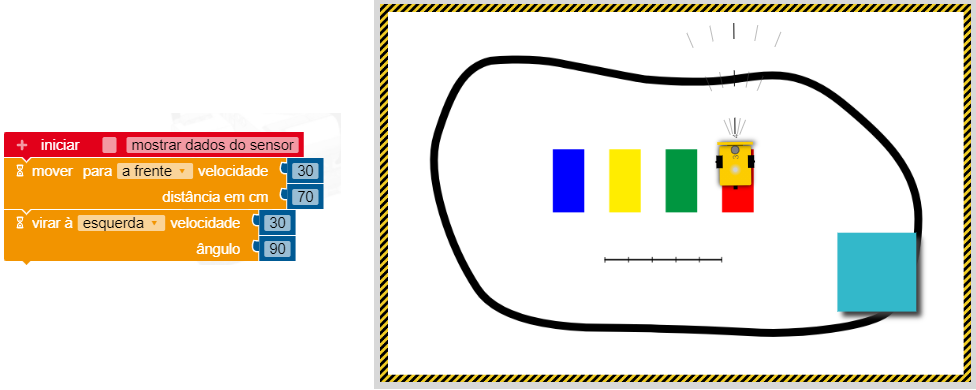
E agora, como fazemos para mover para frente? Se você pensou em usar o comando mover para a frente, acertou!! É acrescentar o comando e ir mudando o valor da distância até ele alcançar depois da linha.
Vamos simular e ver como ficou?

Agora é sua vez de inventar e brincar com o robô EV3
Atividade prática – Andando pela cidade
Bem-vindas à terceira oficina no STEAM4Girls. Nela você terá que guiar o robô EV3 pelo mapa da cidade até chegar ao final. E como fazer isso?
Na parte superior da tela do simulador, clique no botão ![]() até chegar na seguinte imagem:
até chegar na seguinte imagem:
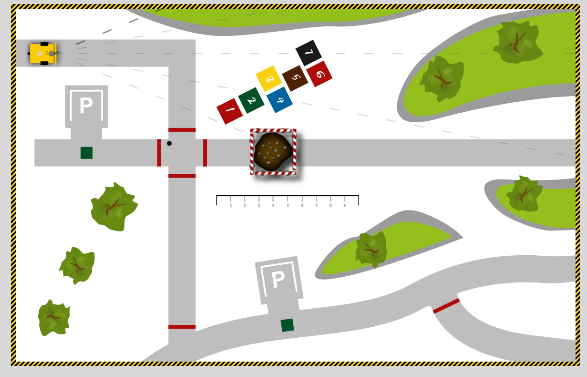
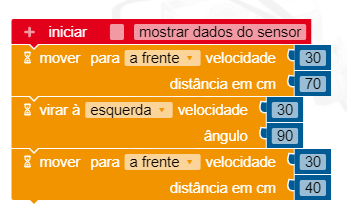
Nela, você terá que fazer um código para o robô andar pelo seguinte trajeto:
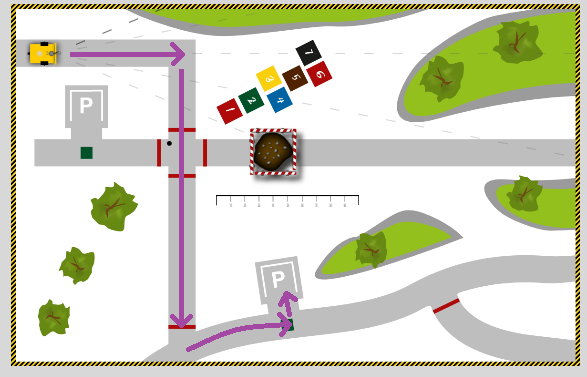
Ele deve seguir o caminho das setas roxas até o quadrado com o “P”.
Bom desafio e bom aprendizado!
0 comentário