Sensores de animais: ecolocalização
Os animais possuem alguns sensores em seu corpo. Por exemplo, nós humanos possuímos os 5 sentidos: olfato, tato, visão, paladar e audição. Então nós somos capazes de sentir cheiros, sentir texturas, ver e definir coisas, sentir gostos e ouvir sons, são os nossos sensores humanos.

Quanto aos sons, nossos ouvidos só conseguem ouvir uma certa faixa de frequências, que varia de 20 Hz (sons mais graves) até 20.000 Hz (sons mais agudos), e conforme vamos ficando mais velhos, perdemos a capacidade de ouvir sons tão agudos.

Outros animais conseguem ouvir sons que os humanos não conseguem: os infrassons e os ultrassons. Infra vem de ser “abaixo de”, ou seja, são frequências abaixo do que os humanos conseguem. Já o ultra vem de “superior a”, ou seja, frequências superiores ao que os humanos conseguem ouvir.

O elefante é um exemplo de animal que consegue ouvir infrassons. Ele usa esses sons para se comunicar com outros elefantes, e além disso, conseguem perceber variações na superfície do solo, podendo prever terremotos, tsunamis e erupções vulcânicas.
Já o golfinho e o morcego são exemplos de animais que conseguem ouvir os ultrassons, uma ferramenta muito importante de ecolocalização. Isso acontece pois a visão deles é muito limitada, então eles emitem sons para conseguir se localizar no ambiente e se mover sem atingir obstáculos, além de localizar outros animais.
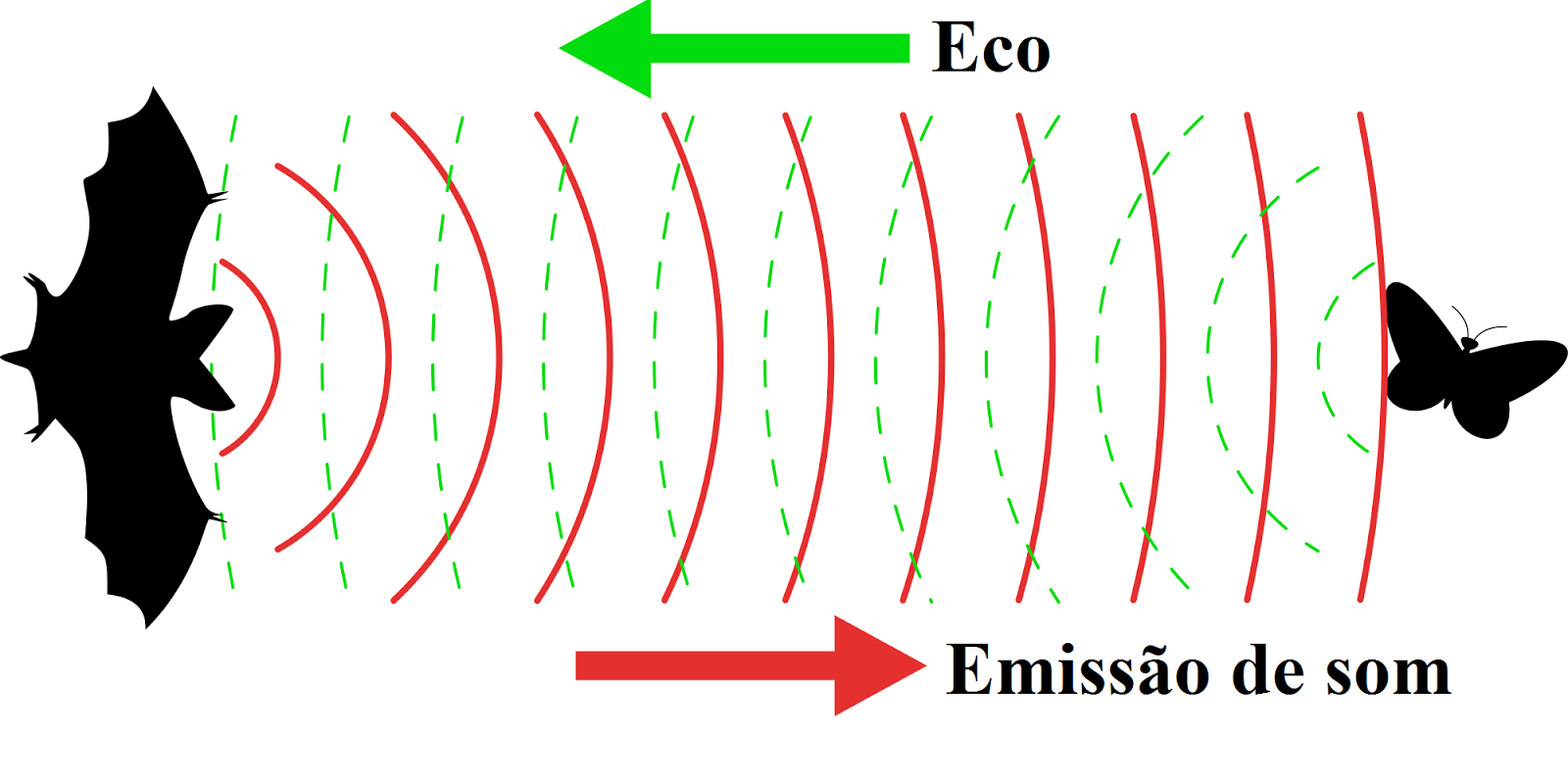
Se chama ecolocalização pois é uma localização baseada no eco. Exemplo: o morcego para se localizar envia um som de frequência muito alta que reflete quando bate em algum obstáculo (como a borboleta da imagem). Quando o eco retorna ao morcego, ele sabe dizer a distância que está do objeto. Incrível, né?
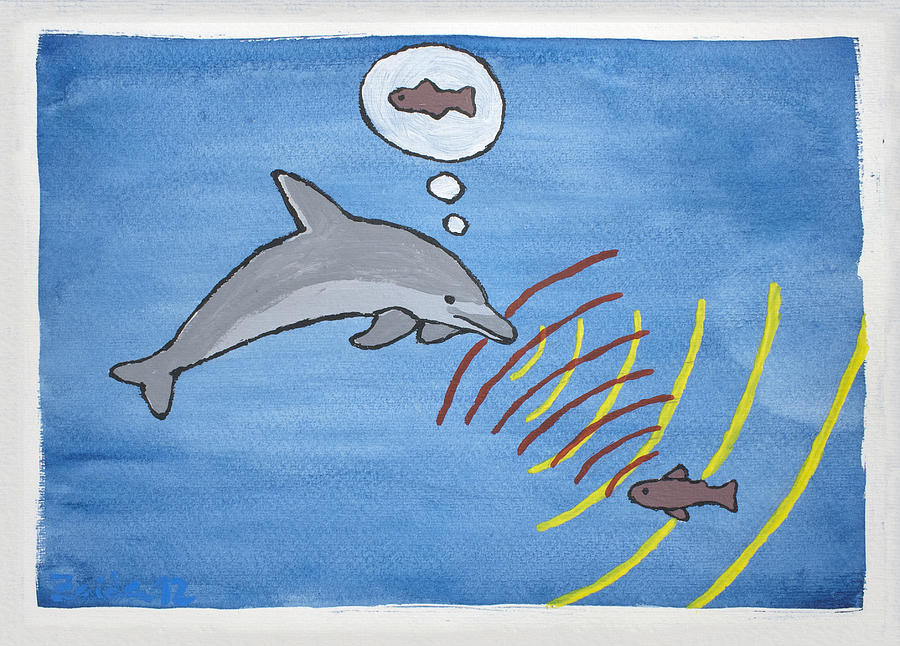
Diferente do morcego que envia apenas uma alta frequência, o golfinho envia pulsos de frequências variáveis (em amarelo, na imagem) por sua laringe. Quando o sinal que ele envia bate em algum objeto, retorna um eco (em vermelho) que é captado por suas mandíbulas e vai até o ouvido. Com isso ele consegue reconhecer o que está em sua volta.
Mas e para que mais os sons podem ser usados?
- Medicina: os aparelhos de ultrassonografia possuem diversas utilizações, como na gravidez para ver o desenvolvimento gestacional. Também é utilizado para ver o estado de alguns órgãos (como o fígado e rins), e verificar se há alguma anomalia.
- Carros: os sensores de ré são ultrassônicos, eles calculam a distância entre o carro e o objeto e informa ao motorista, ajudando na hora de estacionar.
- Shoppings e lojas: tem como usar o sensor ultrassônico para fazer controle de número de pessoas dentro de lojas, e até de vagas em estacionamentos.

E como nós vamos utilizar isso em nosso robozinho?

Existe um sensor que conseguimos comprar chamado “Sensor Ultrassônico”. Ele é composto de dois círculos em uma plaquinha azul, um círculo emissor de ondas e outro receptor, que recebe o eco das ondas.
Ele funciona da seguinte forma: o círculo emissor envia o sinal de frequência e conta o tempo até que círculo receptor recena o eco. Pelo tempo entre o envio do sinal e o retorno, é possível calcular a distância do objeto.
Para usar, é só conectar esse sensor na placa controladora e escrever o código para ele. Por sorte, nosso robô EV3 já possui esse sensor incluso nele, então não precisamos conectar nada.

Funcionamento do Sensor Ultrassônico
Então vamos botar a mão na massa!
Usando o sensor ultrassônico no EV3
Para utilizar o sensor ultrassônico, vamos pensar primeiro: porque usar esse sensor ao invés de usar o sensor de toque, que aprendemos anteriormente?
A resposta é: porque nem sempre a gente pode tocar no objeto. Imagina se quando estiver estacionando um carro com o sensor de ré, tivesse que tocar no outro carro para ele informar que chegou no limite, isso não seria legal pois estaríamos batendo no outro carro. Para isso, usamos o sensor ultrassônico, pois ele vai informando a distância conforme nos aproximamos, sem tocar em nada. Bem mais seguro!
Então, quando nós fizermos nosso robô desviar dos obstáculos, ele não precisará tocar neles.
Agora é só abrir o EV3dev e começar!
Nós faremos um código para o robô andar para frente e, se tiver um obstáculo perto, desviar dele. Ou seja:
andar para frente
se tiver algum objeto perto, virar
andar para frente
… (repete para sempre)
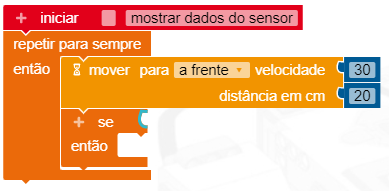
Para andar pra frente, usaremos um comando já conhecido: o mover para a frente. Lembrando que precisamos usar o comando repetir para sempre, pois ele tem que sempre repetir a mesma coisa: andar pra frente e verificar se tem objeto.

Agora temos que inserir a pergunta: o robô está perto de um obstáculo? Se sim, virar. Fazemos isso utilizando os comandos laranja escuros (o terceiro ícone).
Para conseguir ler a distância do sensor ultrassônico, é só ir no segundo ícone na esquerda (o verde) e ir em “ler distância cm sensor ultra-sónico Port“. Vamos definir que se o objeto estiver a 10 centímetros de distância, ou menos, ele irá virar.
Vamos adicionar o comando azul claro (quarto ícone na esquerda) para comparar. Se a leitura for menor ou igual que (≤) 10, então executa. O valor “10” foi inserido com os comandos matemáticos, o ícone azul escuro (quinto ícone a esquerda).

Após isso, vamos colocar o que ele deve executar após encontrar o objeto. No nosso caso, viraremos para algum lado, você pode decidir. Aqui no exemplo ele virará para a direita.
Você pode escolher o ângulo que o robô pode virar, vamos definir 90º para ser uma curva completa.

Vamos ver como ficou.

É, não deu tão certo. Isso acontece porque estamos movendo ele para frente por usa distância muito grande (20 centímetros). Então vamos mudar essa distância para 5 centímetros e ver como fica.


Agora é sua vez de inventar e brincar com o robô EV3
Atividade prática – Desviando de objetos
Bem-vindas à quinta oficina no STEAM4Girls. Nela você terá que desenvolver um código pro robô EV3 que utilize o sensor ultrassônico. O código terá que:
- Desviar ao ver um objeto muito próximo
- Toda vez que virar, acionar um apito
Dica: para o robô não ficar batendo toda vez, antes de virar para um dos lados, faça ele dar uma pequena ré para virar sem problemas!
Bom desafios e bom aprendizado!
0 comentário